Å─╦╣╠╣ĖŻ┤¾īWĄ─ VIMA ÖCŲ„╚╦ųŪ─▄¾wŻ¼ĄĮ╣╚ĖĶ DeepMind ═Ų│÷┐žųŲÖCŲ„╚╦Ą─ęĢėX - šZčį - äėū„Ż©VLAŻ®Ą──Żą═ RT-2Ż¼┤¾─Żą═╝ė│ųĄ─ÖCŲ„╚╦蹊┐éõ╩▄ĻPūóĪŻ
«öŪ░Ż¼ūį▒OČĮ║═šZčį▒OČĮĄ─łDŽ±─Żą═ęčĮø░³║¼žSĖ╗Ą─╩└Įńų¬ūRŻ¼▀@ī”ė┌Ę║╗»üĒšfĘŪ│Żųžę¬Ż¼Ą½łDŽ±╠žš„╩ŪČ■ŠSĄ─ĪŻ╬ęéāų¬Ą└Ż¼ÖCŲ„╚╦╚╬äš═©│ŻąĶę¬ī”¼FīŹ╩└Įńųą╚²ŠS╬’¾wĄ─Äū║╬ą╬ĀŅėą╦∙┴╦ĮŌĪŻ
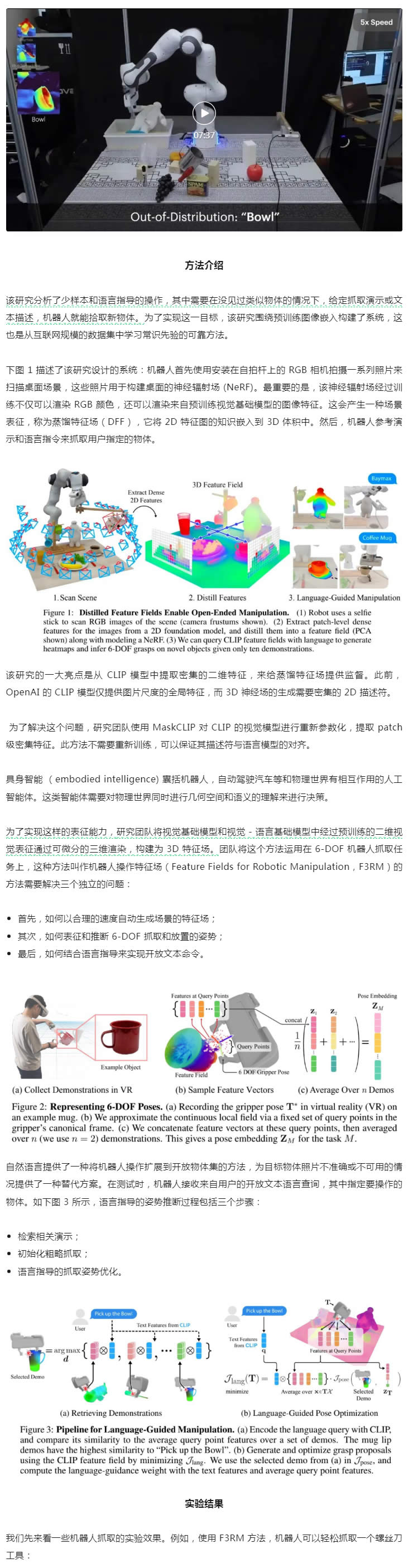
╗∙ė┌┤╦Ż¼üĒūį MIT CSAIL ║═ IAIFI Ą─蹊┐š▀└¹ė├š¶s╠žš„ł÷Ż©Distilled Feature FieldŻ¼DFFŻ®Ż¼īó£╩┤_Ą─ 3D Äū║╬łDą╬┼cüĒūį 2D ╗∙ĄA─Żą═Ą─žSĖ╗šZ┴xĮY║ŽŲüĒŻ¼ūīÖCŲ„╚╦─▄ē“└¹ė├ 2D ╗∙ĄA─Żą═ųąžSĖ╗Ą─ęĢėX║═šZčįŽ╚“ׯ¼═Ļ│╔šZčįųĖī¦Ą─▓┘ū„ĪŻ
šō╬─ĄžųĘŻ║https://arxiv.org/abs/2308.07931
Š▀¾wüĒšfŻ¼įō蹊┐╠ß│÷┴╦ę╗ĘNė├ė┌ 6-DOF ūź╚Ī║═Ę┼ų├Ą─ąĪśė▒ŠīW┴ĢĘĮĘ©Ż¼▓ó└¹ė├ÅŖ┤¾Ą─┐šķg║═šZ┴xŽ╚“×Ę║╗»ĄĮ╬┤ęŖ▀^╬’¾w╔ŽĪŻ╩╣ė├Å─ęĢėX - šZčį─Żą═ CLIP ųą╠ß╚ĪĄ─╠žš„Ż¼įō蹊┐╠ß│÷┴╦ę╗ĘN═©▀^ķ_Ę┼ąįĄ─ūį╚╗šZčįųĖ┴Ņī”ą┬╬’¾w▀Mąą▓┘ū„Ż¼▓óš╣╩Š┴╦▀@ĘNĘĮĘ©Ę║╗»ĄĮ╬┤ęŖ▀^Ą─▒Ē▀_║═ą┬ą═╬’¾wĄ──▄┴”ĪŻ
蹊┐łFĻĀė├ę╗éĆųvĮŌęĢŅlįö╝ÜĮķĮB┴╦ F3RM ĘĮĘ©Ą─╝╝ągįŁ└ĒŻ║

 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |